The Spark of a Girl Scout Idea
When I was about six years old my family took a trip to India to visit my aunt and uncle. It was there that I witnessed the struggle that visually-impaired people face on a daily basis when I spent time with my uncle. My uncle wasn’t born blind—he lost his vision in his 20s. He struggled to find his way around his own house, especially when sudden objects hindered his path. When I came back from India, I blindfolded myself to put myself in a visually-impaired person’s shoes. It was pretty difficult. This experience influenced me to find a way to help those who were like my uncle. I wanted to help those who were visually impaired, and I dedicated my Gold Award project to that goal, with technology paving the way to success.
Globally, it is estimated that at least 2.2 billion people have a vision impairment or blindness. Of those people, at least 1 billion have a vision impairment that could have been prevented or still needs to be addressed. According to the National Institute of Health, visual impairment and blindness cases in US are expected to double by 2050. The National Federation of the Blind claims a staggering 7,894,900 people are visually impaired in the US, with 797,300 of them living in California alone. Clearly visual impairment is a growing problem, and it needs to be addressed right now. Medical research is aimed towards physiologically curing blindness, but that doesn’t help people currently struggling with visual impairment. A big obstacle these people face is identifying objects in front of them. Some bigger companies are working on expensive and fancy solutions with the latest technology, but I planned to find a more cost-effective solution.
The Gold Award Journey
Keeping my uncle and others who are visually impaired in mind, I began to create a device to help those who are visually impaired sense the distance between an object hindering their path. I started learning Robotics outside of school a few years ago, and I learned that Computer Vision could be used to analyze images. I started with a device called Raspberry Pi and its camera. I captured the images and started analyzing images based on shape, size etc. Here is the process of my Gold Award Journey my team and I came up with:
Phase 1: Analysis using Robotic car
The core concept of this project is understanding how a moving person looks at scenes in front of them, collects the data, processes it in their mind. This happens repeatedly in nano-seconds, and we need to teach a computer to do this.
The first step is to capture the images as we move and see the pattern of how the objects in front of us are changing with movement. We needed the camera to move at a constant speed so that we can do the analysis better. This provided a constant time gap between images. We built a car to mount the camera on and controlled the car’s speed using software, which allowed us to capture images based on different speeds.
We analyzed how some objects grow in size as we approach, or shrink when we move away from them. We also wanted to make a judgment on the distance of the object from us and how the distance changes when we move. At least, this way, we could identify if an object is approaching or going away from us. We used SimpleCV software and confirmed that this software could be used to do this analysis.
Phase 2: Device using Raspberry and Raspberry camera
The next step is finding out how quickly we can process the images using a Raspberry processor, which is basically a mini-computer. There are publicly available programs that we could call through the internet to process images and identify objects. But we decided not to use them as the internet connectivity for our device will require each user to have an internet subscription which would increase the amount they would spend on the device. So, we wrote our own programs using SimpleCV.

The first step in programming was to identify the obstacles in front of the camera. We took images one by one using the camera and processed them sequentially. Raspberry was able to process quickly in nanoseconds, but when we started creating models to identify a variety of objects, the processing time increased considerably. At this point we decided that Raspberry may not be able to process our information at the speed we needed.
Phase 3: Using a better Hardware and Software kit
When we researched for alternate products we found another hardware and software kit. This kit was a start-up kit, but had some pre-built algorithms. Most importantly the cost was low, which would make it easily affordable for all the users eventually. The kit had two processors: one to capture images from the camera, and the second specifically designed to analyze the images and find objects in them. This has worked very well for us.
We were also able to extend the object detection using additional models. We tried converting American Sign Language to letters. This proved that we can extend the models by adding more objects. We taught the camera and computer to recognize ASL and convert it into words. We added more object identifications to the model.

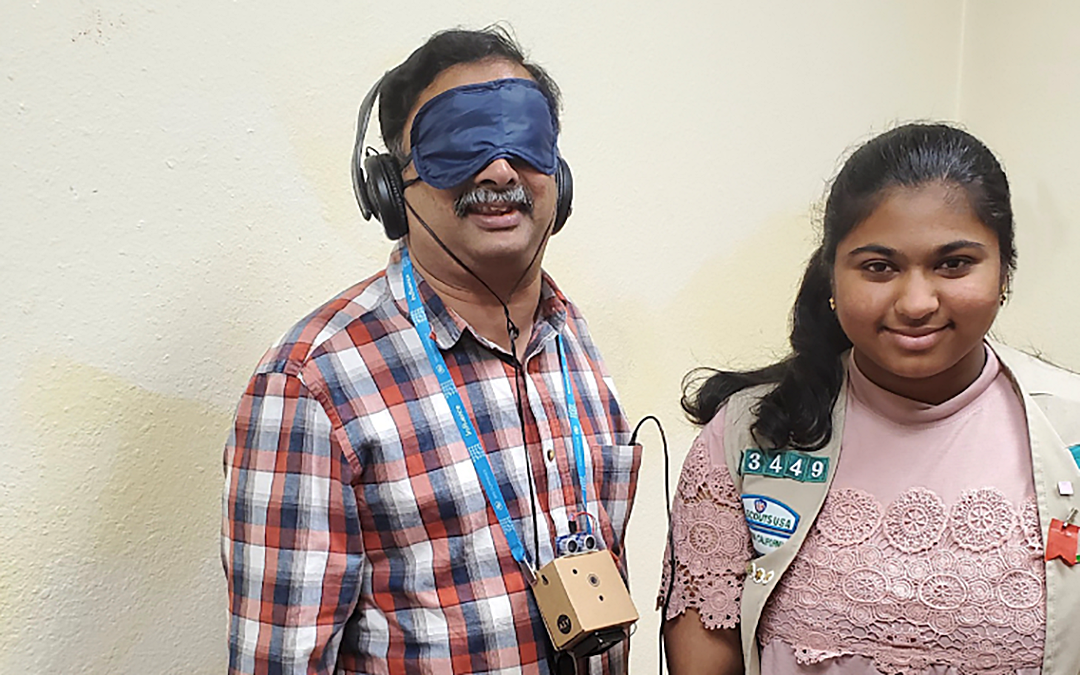
We built additional hardware like distance sensors to measure the distances of obstacles accurately. By adding an audio port, we were able to alert the user through audio like “3 persons LEFT at a distance, one person at a CENTER close by and 2 on RIGHT at a distance.” We were also able to alert the user to “STOP,” if they were too close to an object or person.
The Impact My Gold Award Had On Me
I am sixteen years old, a junior in high school. I never thought before the start of this project that I would be leading a team of adults on a project regarding the blind. I have definitely evolved throughout the process and now, I am able to plan and conduct meetings about the project. Even though the others in the team have more knowledge than I do regarding the science involved in my project, I have been able to consolidate everyone’s ideas, and really work on this project myself with their guidance. I have brainstormed collaboratively with them, created an action plan, performed experiments with their guidance, planned meetings and led the meetings in pursuit of a completed project servicing the blind. I think that as the project has evolved, my own leadership skills have also evolved. Starting off as a shy eleventh grader, I find myself more outspoken now and more excited to have led this project.
What To Do Next
- Check out some more blog posts on Gold Awards and STEM here on Trailhead to get your inspiration rolling.
- Explore different topics to find what you like and what inspires you! Remember that anyone can make a difference in society no matter how old or young you are!
Arpitha Parthasarathy—Arpitha is an Ambassador Girl Scout from Northern California. She has been a Girl Scout since Kindergarten. She actively participates in robotics in her city’s temple and frequently competes in Roborave, a competition held in Northern California and around the globe. In her free time, she enjoys playing the viola, doing Indian classical dance, and singing.
Amazing. Simply amazing! Kudos, Arpitha! You are very inspiring.
Thanks so much.
Excellent job. Keep it up.
What an amazing project! Hope to see you as a National Gold Award Girl Scout!
Thanks so much.
Hello Arpita , how much wil be the cost of the device?? Are there any studies that are done using this device in the medical field ??